|
Assembly, Installation and Usage Notes:
 |
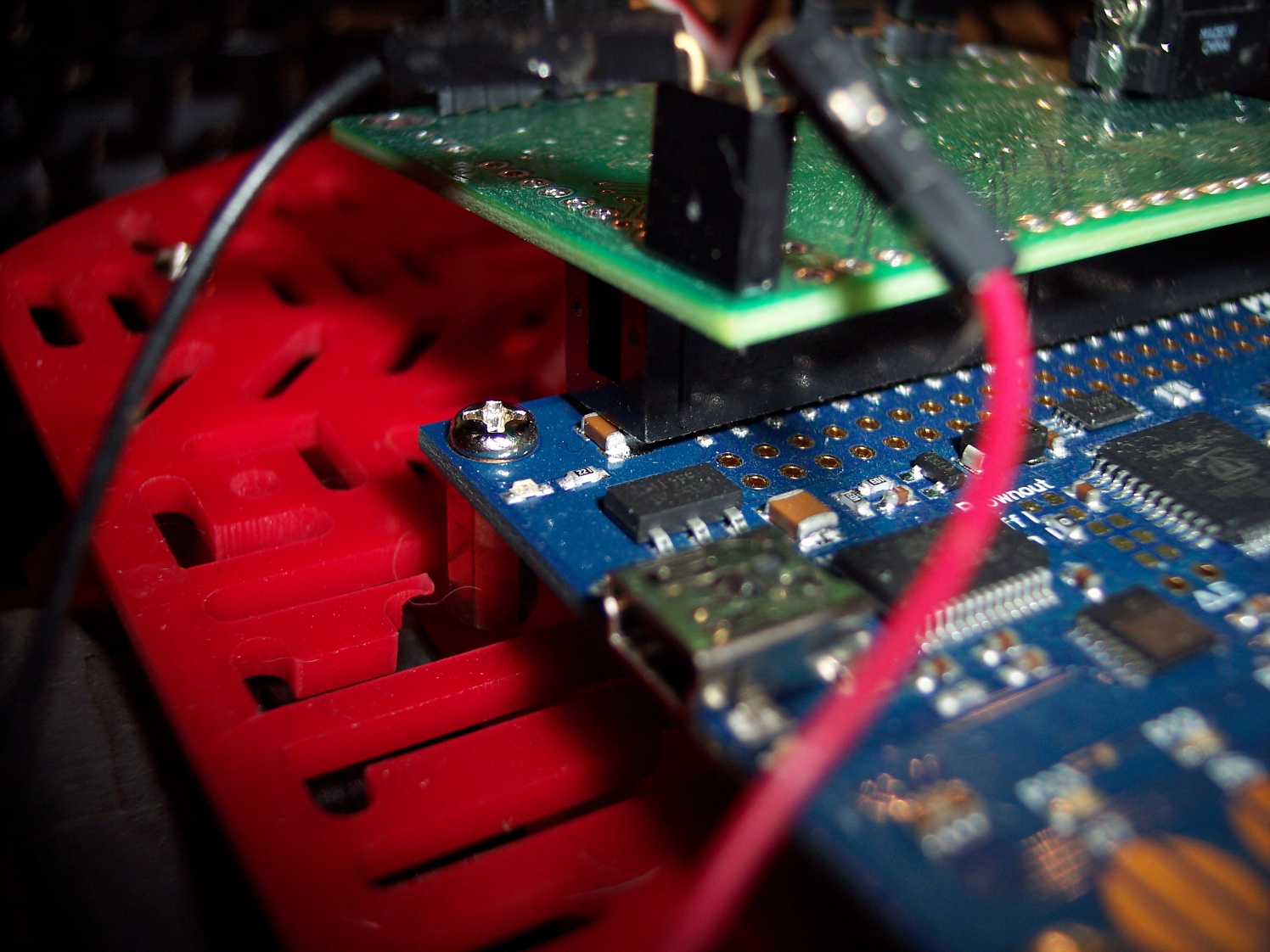
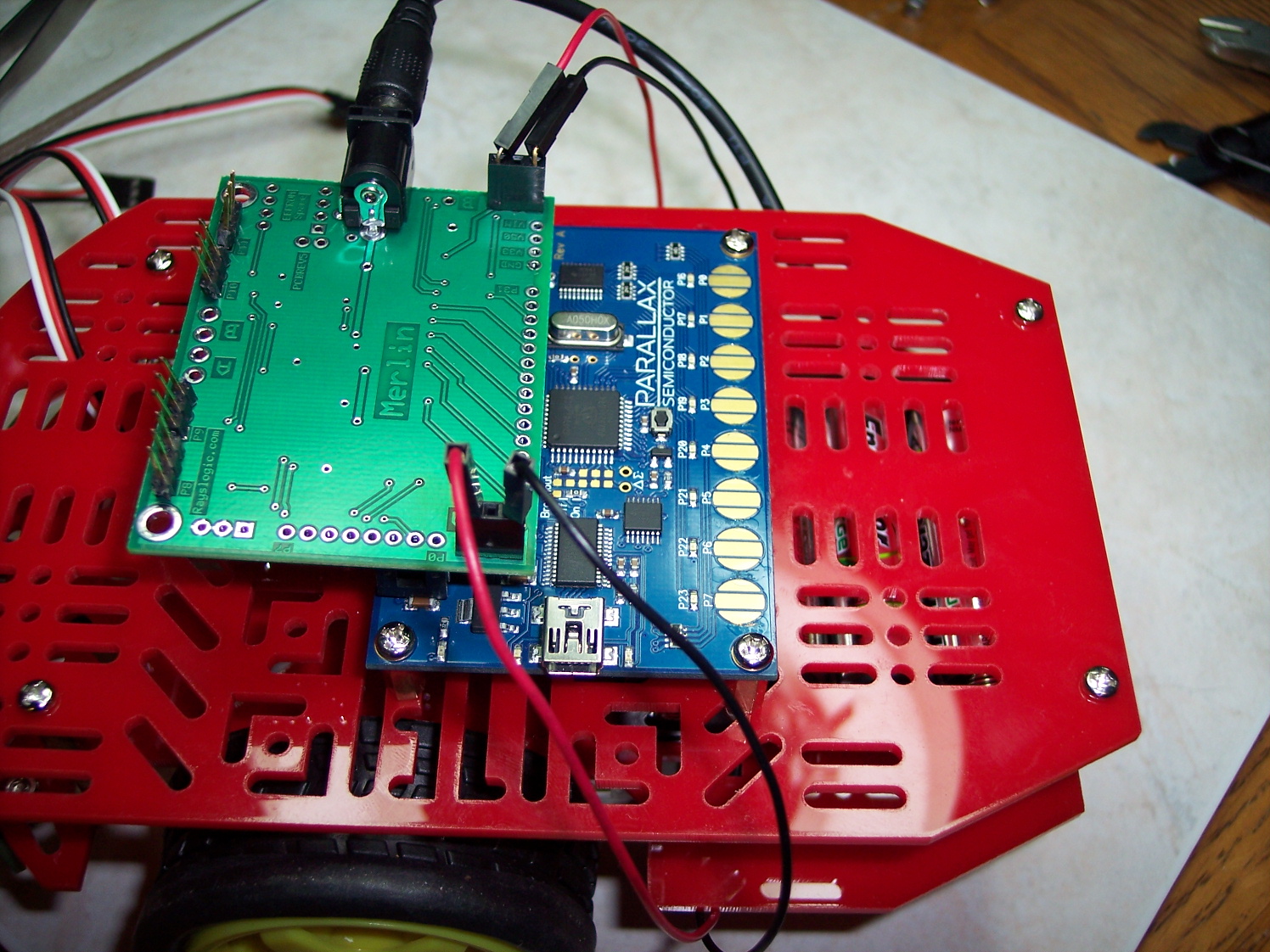
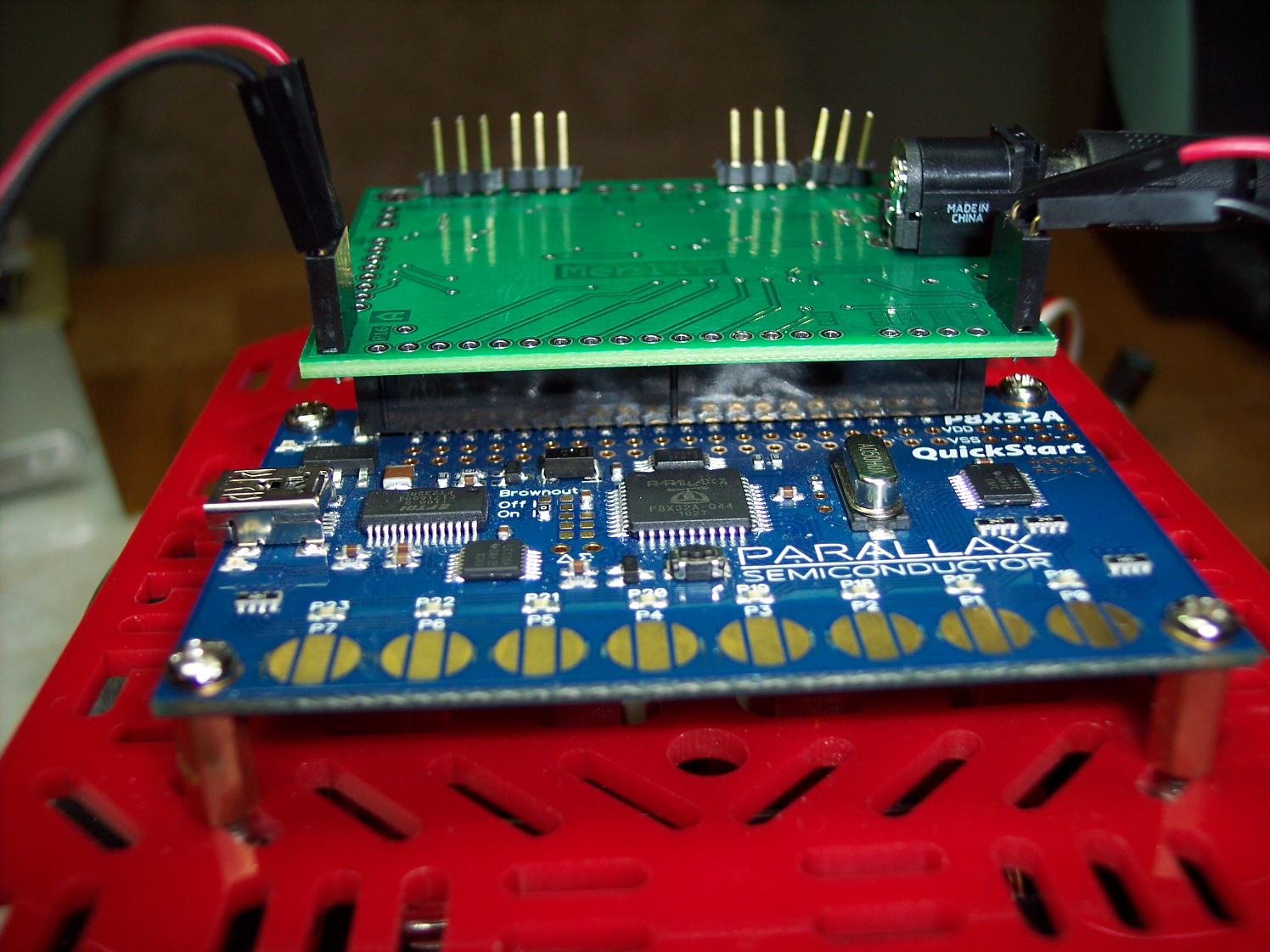
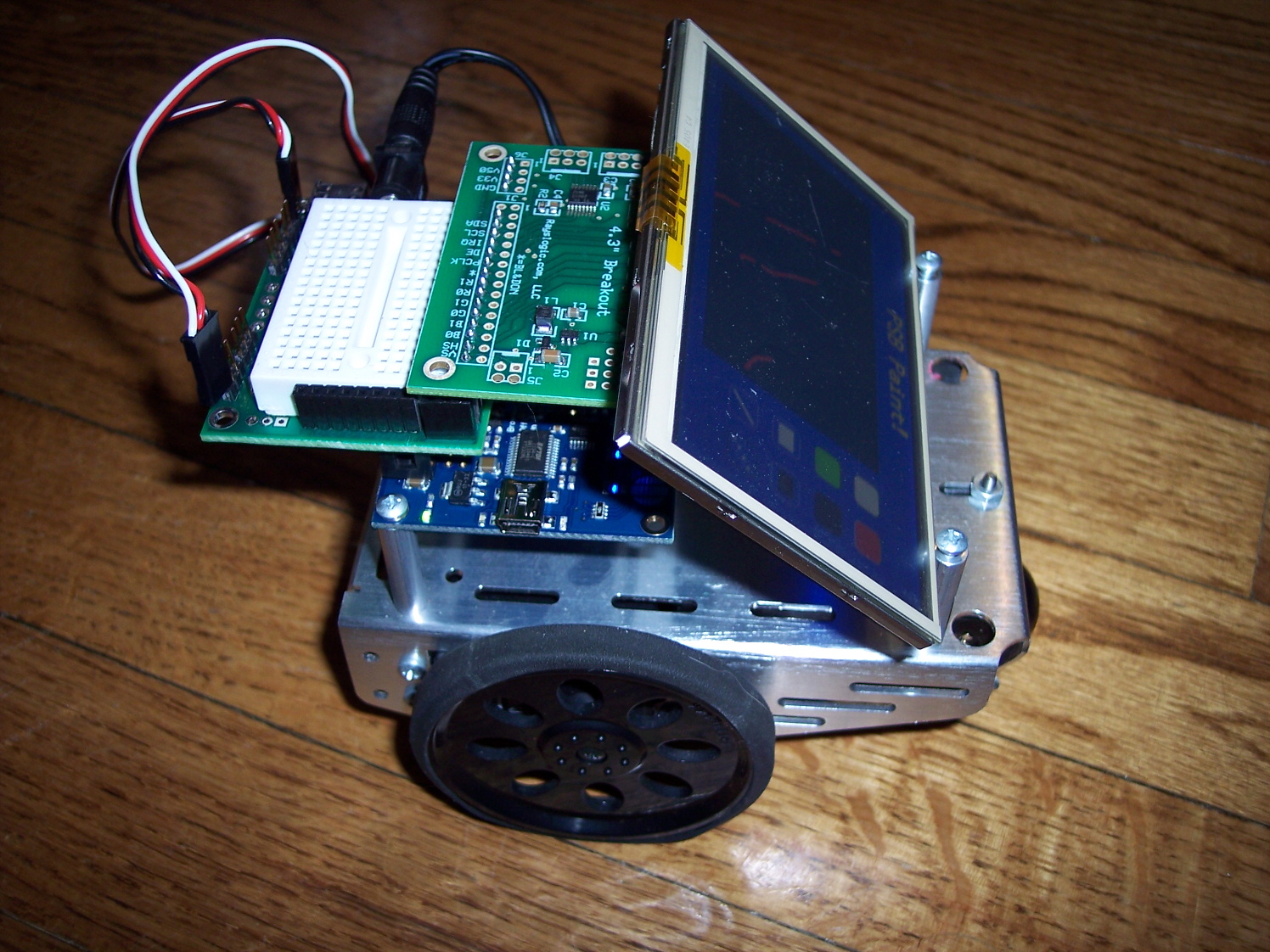
When plugging Merlin into Quickstart, be sure that pins are lined up
correctly. It is possible to be off one column either way (the
long way). Also be careful that Merlin is facing the right way, it
should not be the way that covers up Quickstart. Please look
closely at this photo for the correct alignment (see how the edge of
Merlin's 40-pin connector is right on top of a relatively large SMT
capacitor):
 |

|
|
|
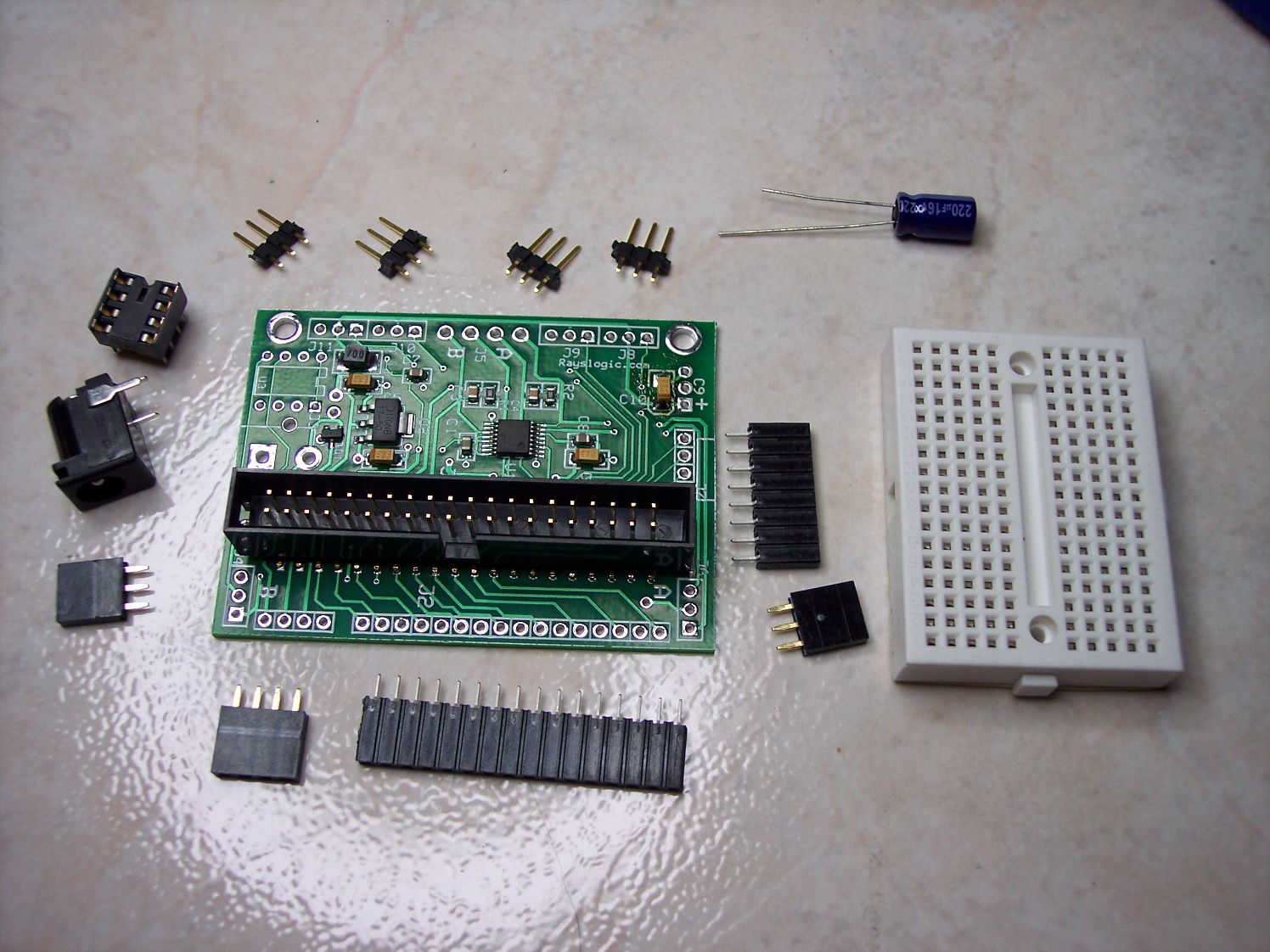
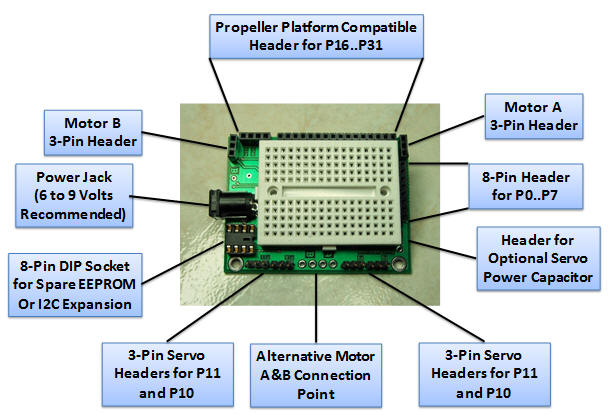
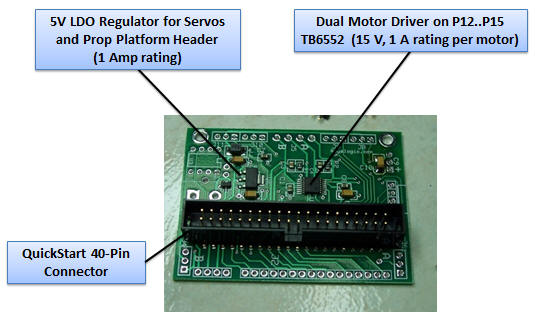
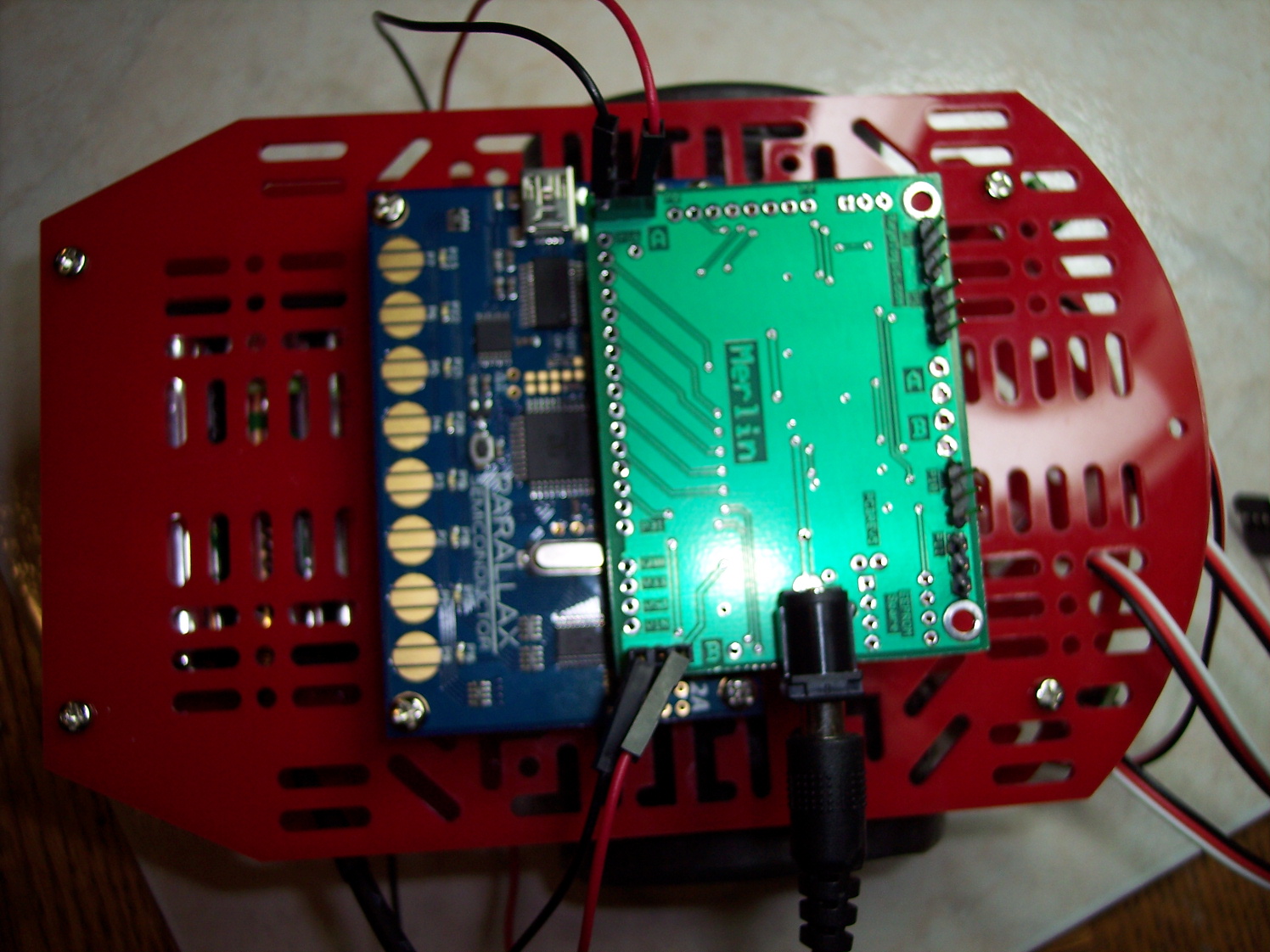
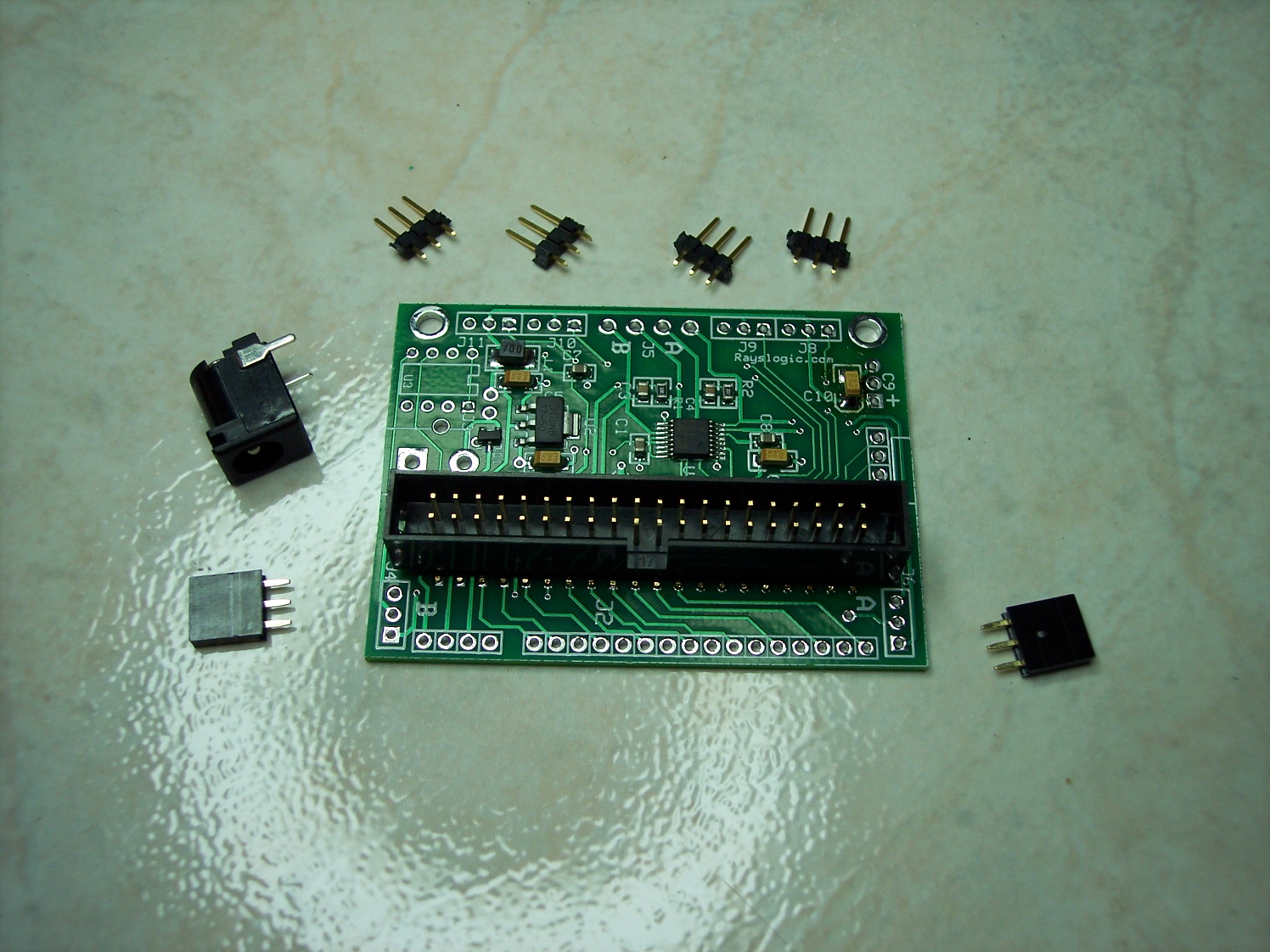
Note that the white stenciled side of Merlin faces down. So,
as you can see in the "Top View Diagram" at the top of this page, you
want to solder the power jack, eeprom header, and servo headers to the
non-stencil side (which is actually the bottom) of the Merlin board.
|
|
If you want to use servos, you will need to install the large
capacitor, or the Propeller will likely reset when the servo moves a
lot. |
|
If you use Merlin to drive bigger motors than those of the
"Magician" robot chassis and are using batteries only to power it, you
may need to install a large capacitor (e.g., 500 uF) between VIN and
Ground on Quickstart. These are pins 40 and 39. You can use
the Quickstart's second 40-pin connector as a convenient place to
install the capacitor.
|
If you also have USB power connected, you don't need the
capacitor. This is because the USB power will keep power on
the Propeller even if the battery power on the power jack is pulled
down. |
|
This requirement is due to the observed fact that two servo
sized motors, when started, can pull down the battery voltage enough
to make the Propeller reset. |
|
A capacitor on Vdd is not as effective as one on Vin for this
purpose. I think this is because once the Quickstart's 3.3 V
regulator drops out, it takes time for it to come back and the
Propeller can reset in this time. |
|
If you are driving large motors from batteries only, it may be a
good idea to provide a second power source for Vin or Vdd because
there is probably some point where this capacitor alone won't be
enough. |
|
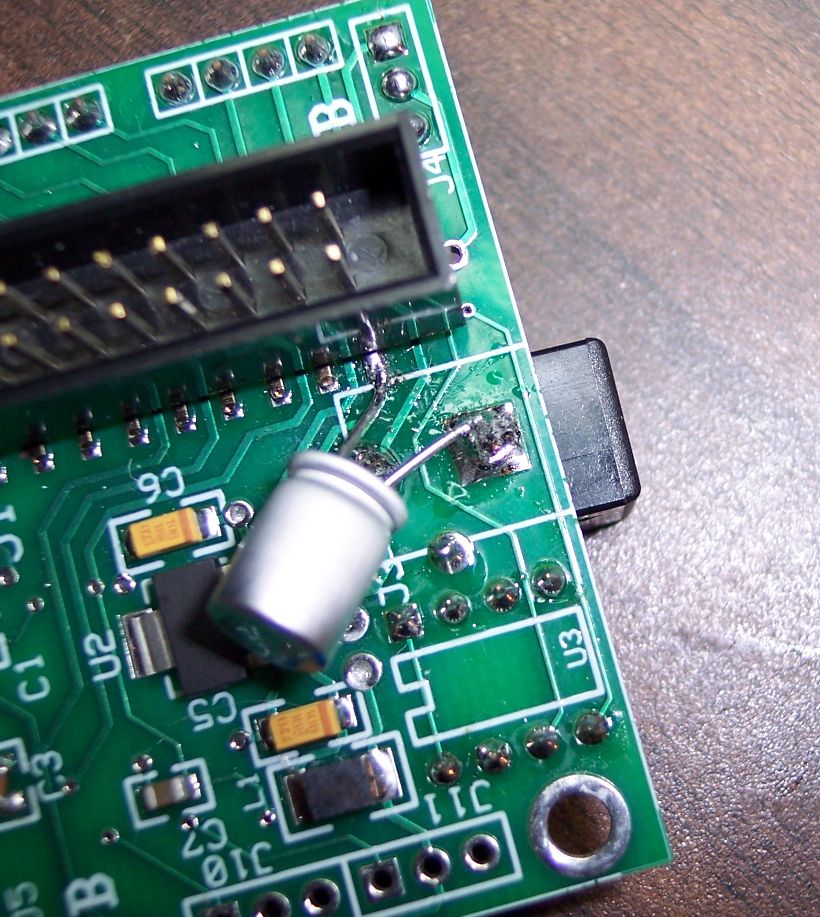
If this capacitor is needed but you don't want to solder
anything onto your Quickstart, it is possible (although perhaps less
attractive) to add this capacitor to Merlin between pin 40 and GND
like this:

|
|
|
|
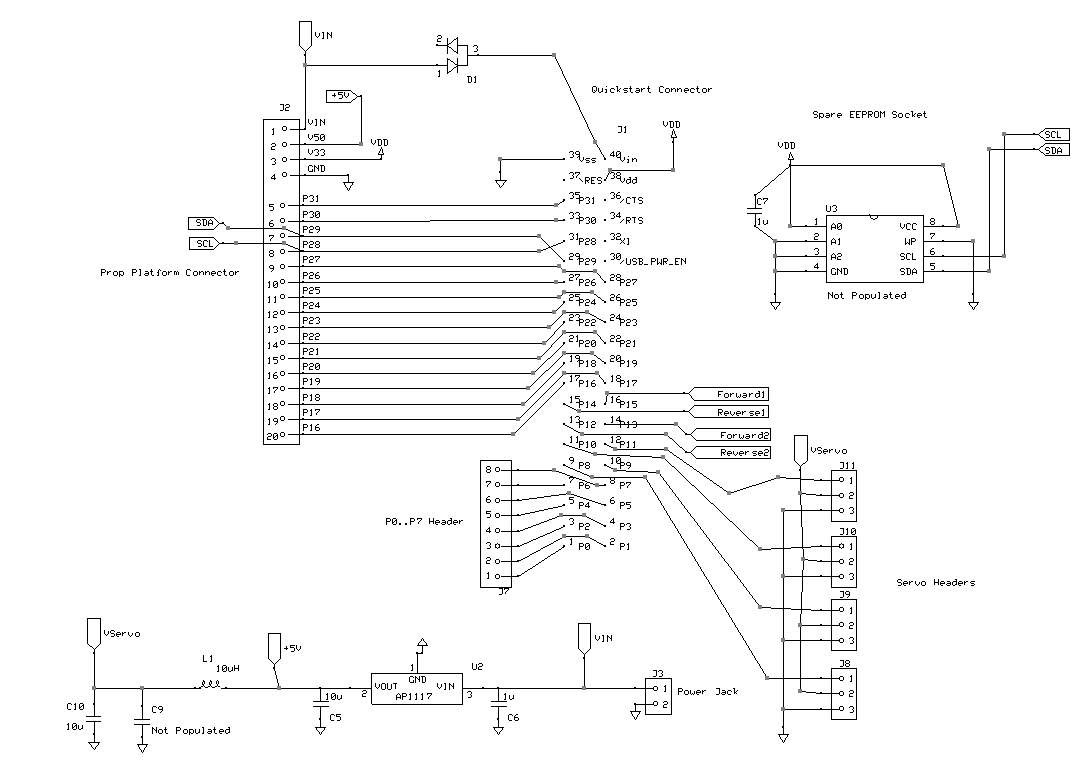
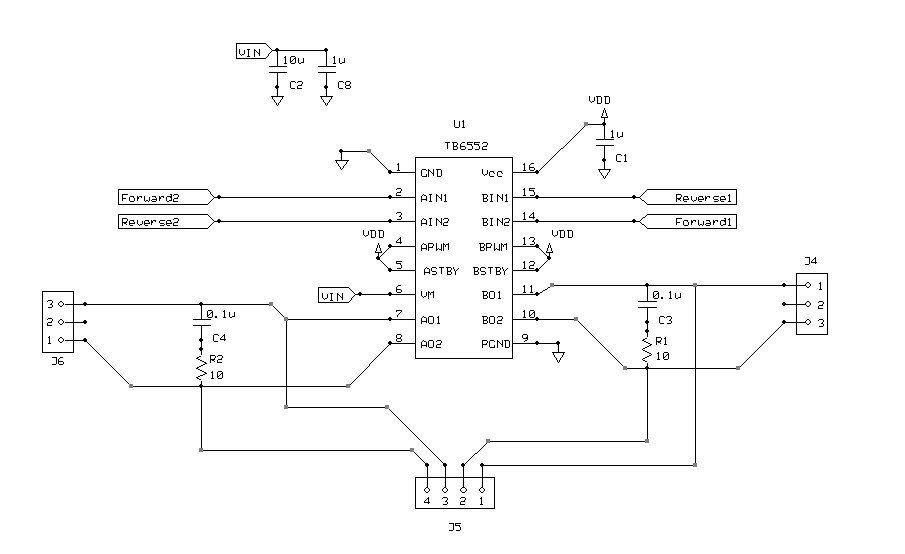
Schematics:
|
|
|
 (click to enlarge)
(click to enlarge)